





Q30TIRM-15100







| Hardware Parameter | |
| Working voltage | 16V |
| Input voltage | 4S ~ 6S (14.8V~25.2V) |
| Output voltage | 5V (connect with PWM) |
| Dynamic current | 1000~1500mA @ 16V |
| Power consumption | Average 16W, Max 24W |
| Working environment temp. | -20℃ ~ +50℃ |
| Output (optional) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| Local-storage | TF card (Up to 512G,class 10, FAT32 format) |
| Picture storage format in TF card | JPG(1920*1080) |
| Video storage format in TF card | MP4(1080P 30fps) |
| Control method | PWM / TTL / S.BUS / TCP / UDP |
| Gimbal Spec | |
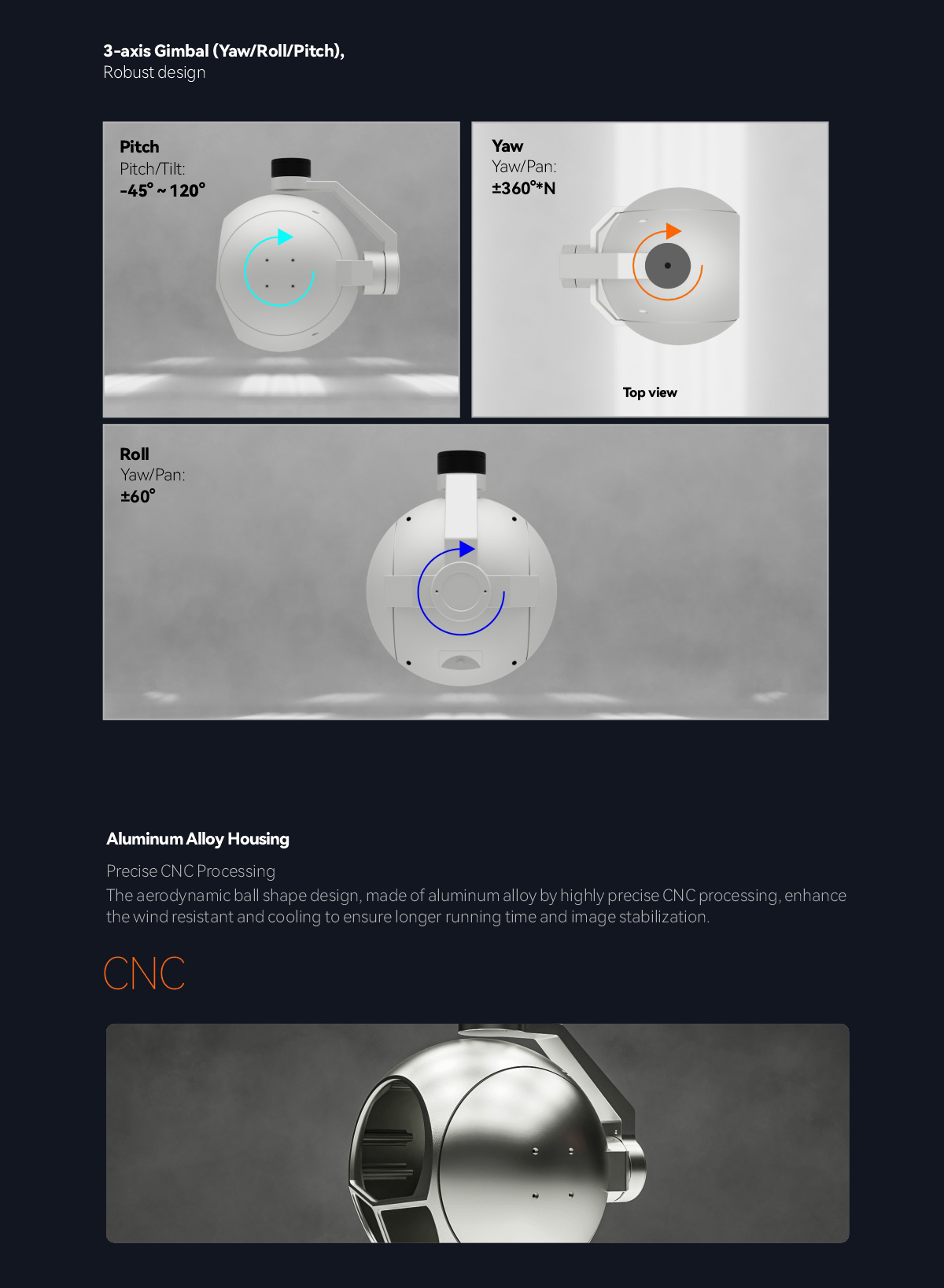
| Mechanical Range | Pitch/Tilt:-55°~105°, Roll: ±60°, Yaw/Pan: ±360°*N |
| Controllable Range | Pitch/Tilt: -45°~100°, Yaw/Pan: ±360°*N |
| Vibration angle | Pitch/Roll/Yaw: ±0.02° |
| One-key to center | √ |
| EO Camera spec | |
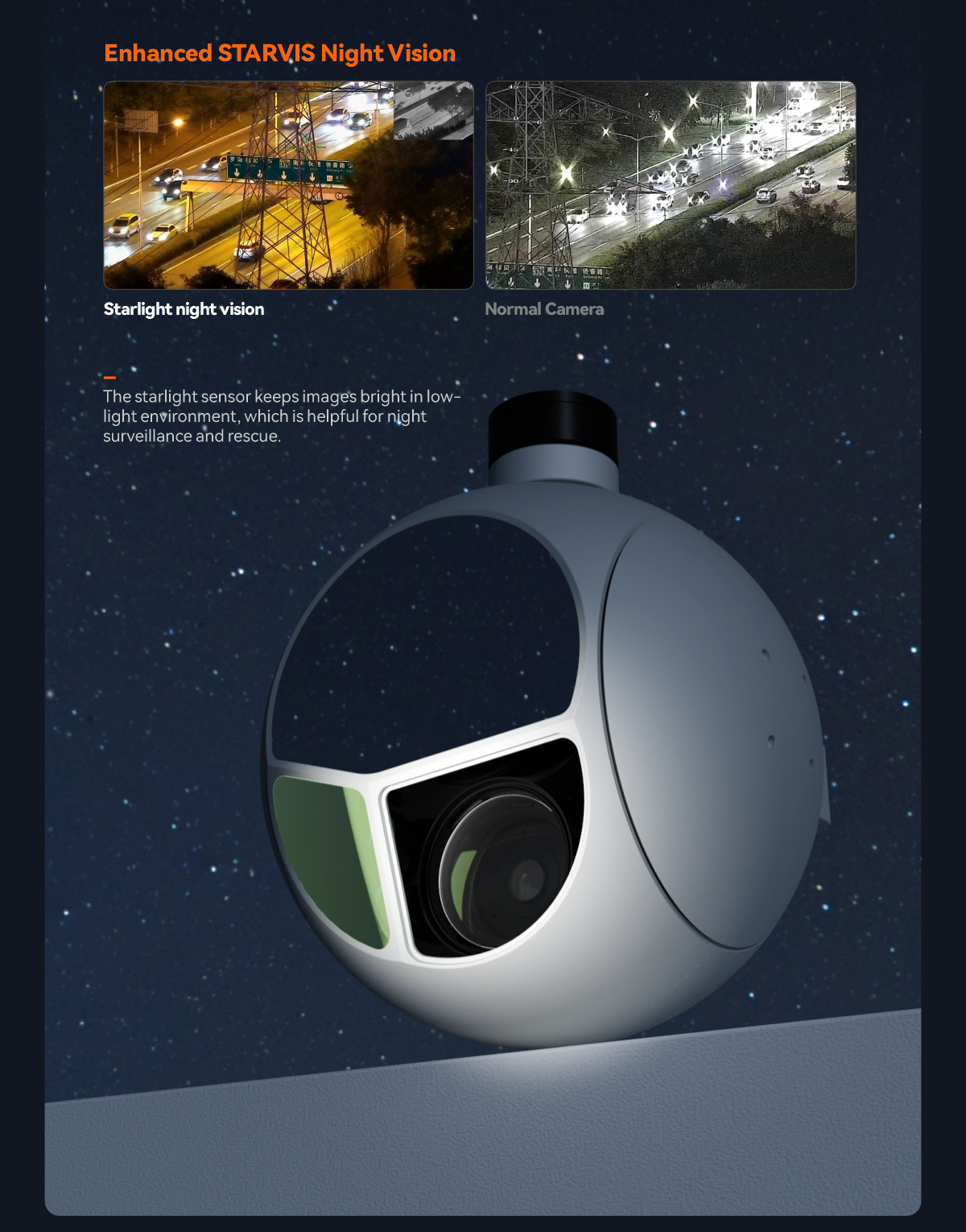
| Imager Sensor | 1/1.8 Type STARVIS CMOS Sensor |
| Picture quality | 4.17MP |
| Lens optical zoom | 30x, f=6.5~162.5mm, F1.6 to F4.8 |
| Digital zoom | 12x (max. 432x with StableZoom) |
| Min object distance | 100 mm (Wide end), 1200 mm (Tele end) |
| Horizontal viewing angle | 58.1°(wide end) ~ 2.3°(tele end) |
| Image S/N | 50 dB (Weight On) |
| Min illumination | In the case of ICR-Off (Typical value) 0.009 lx (1/30 sec, 50%, High Sensitivity mode On) 0.09 lx (1/30 sec, 50%, High Sensitivity mode Off) 0.0012 lx (1/4 sec, 1/3 sec, 50%, High Sensitivity mode On) 0.012 lx (1/4 sec, 1/3 sec, 50%, High Sensitivity mode Off) In the case of ICR-On 0.00008 lx (1/30 sec, 50%, High Sensitivity mode On) 0.00063 lx (1/30 sec, 50%, High Sensitivity mode Off) 0.000005 lx (1/4 sec, 1/3 sec, 30%, High Sensitivity mode On) |
| High Sensitivity mode On/Off | Off |
| Recommended illumination | 100 lx to 100,000 lx |
| Gain | Auto/Manual (0 to 50.0 dB (0 to 28 step)) Max. Gain Limit (10.7 to 50.0 dB (6 to 28 step)) |
| White balance | Auto, ATW, Indoor, Outdoor, One Push WB, Manual WB, Outdoor Auto, Sodium Vapor Lamp (Fix/Auto/Outdoor Auto) |
| Wide Dynamic Range Mode | On/Off |
| Shutter speed | 1/1 sec to 1/10000 sec (22 steps) |
| Backlight compensation On/Off | Off |
| Image Stabilizer On/Off/Hold | Off |
| ICR On/Off | Off |
| Noise Reduction | On/Off |
| Defog | On/Off (low, mid, high) |
| IR Thermal Imager Spec | |
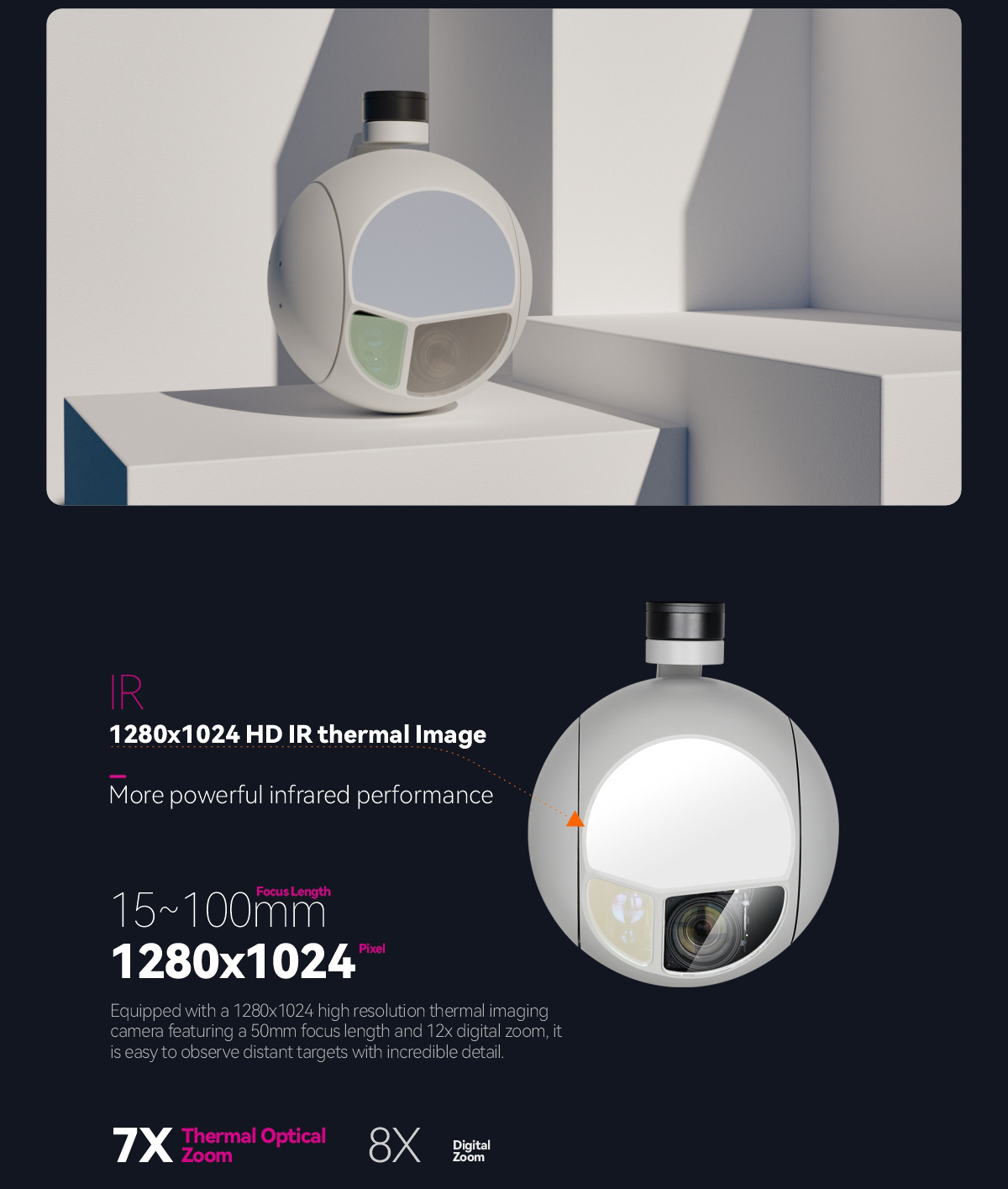
| Focus Length | 15~100mm |
| Horizontal FOV | 54.2°~8.8° |
| Vertical FOV | 44.5°~7.0° |
| 15~100mm Detective Distance (Man: 1.8x0.5m) | 625~4167 meters |
| 15~100mm Recognize Distance (Man: 1.8x0.5m) | 156~1042 meters |
| 15~100mm Verified Distance (Man: 1.8x0.5m) | 78~521 meters |
| 15~100mm Detective Distance (Car: 4.2x1.8m) | 1917~12778 meters |
| 15~100mm Recognize Distance (Car: 4.2x1.8m) | 479~3194 meters |
| 15~100mm Verified Distance (Car: 4.2x1.8m) | 240~1597 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 1280*1024 |
| Pixel size | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤40mK@25℃,F #1.0 |
| Color palette | White hot, black hot, pseudo color |
| Digital zoom | 1x ~ 8x |
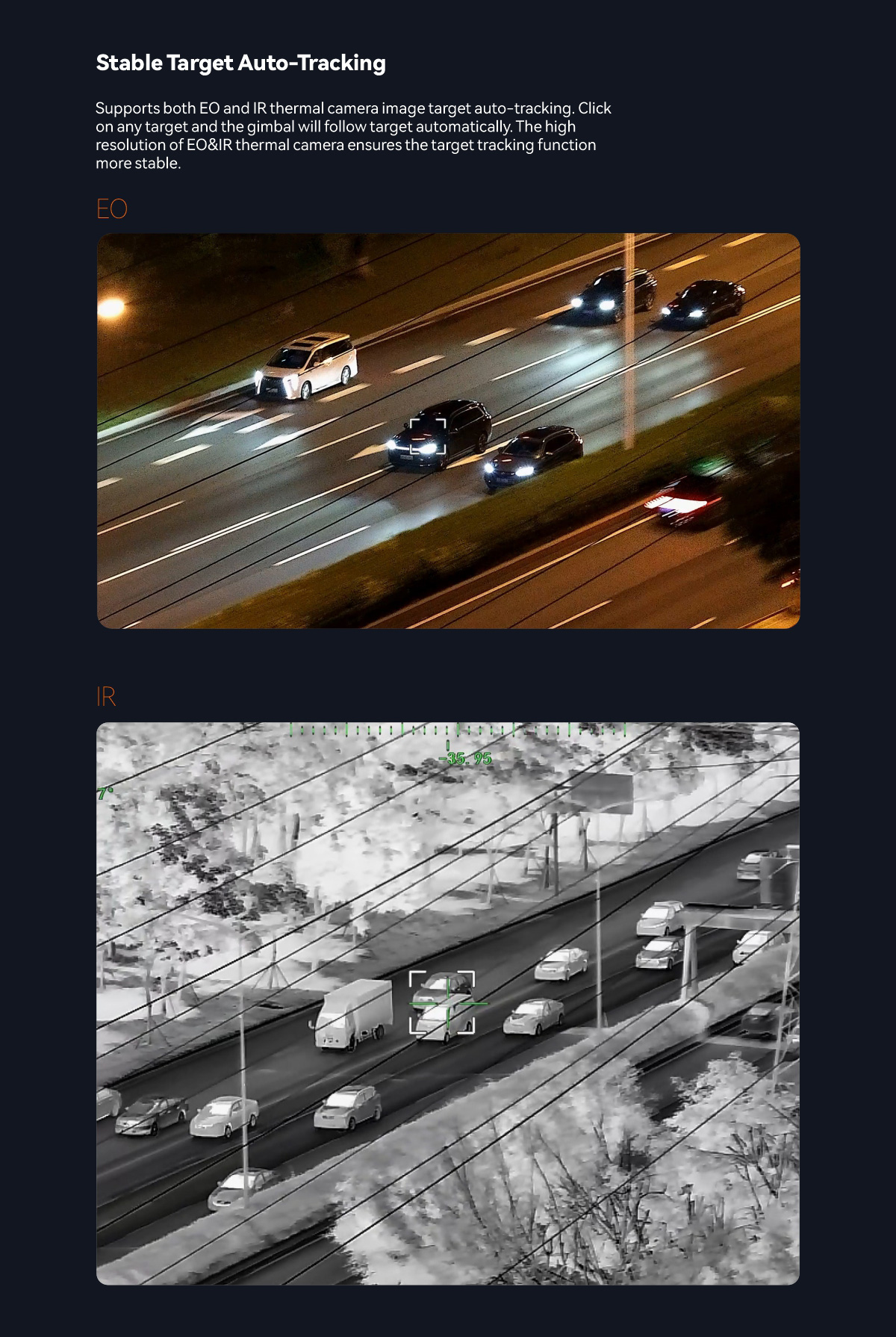
| EO / IR Camera Object Tracking | |
| Update rate of deviation pixel | 50Hz |
| Output delay of deviation pixel | 5ms |
| Minimum object contrast | 5% |
| SNR | 4 |
| Minimum object size | 32*32 pixel |
| Maximum object size | 128*128 pixel |
| Tracking speed | ±48 pixel/frame |
| Object memory time | 100 frames (4s) |
| The mean square root values of pulse noise in the object position | < 0.5 pixel |
| Laser Rangefinder | |
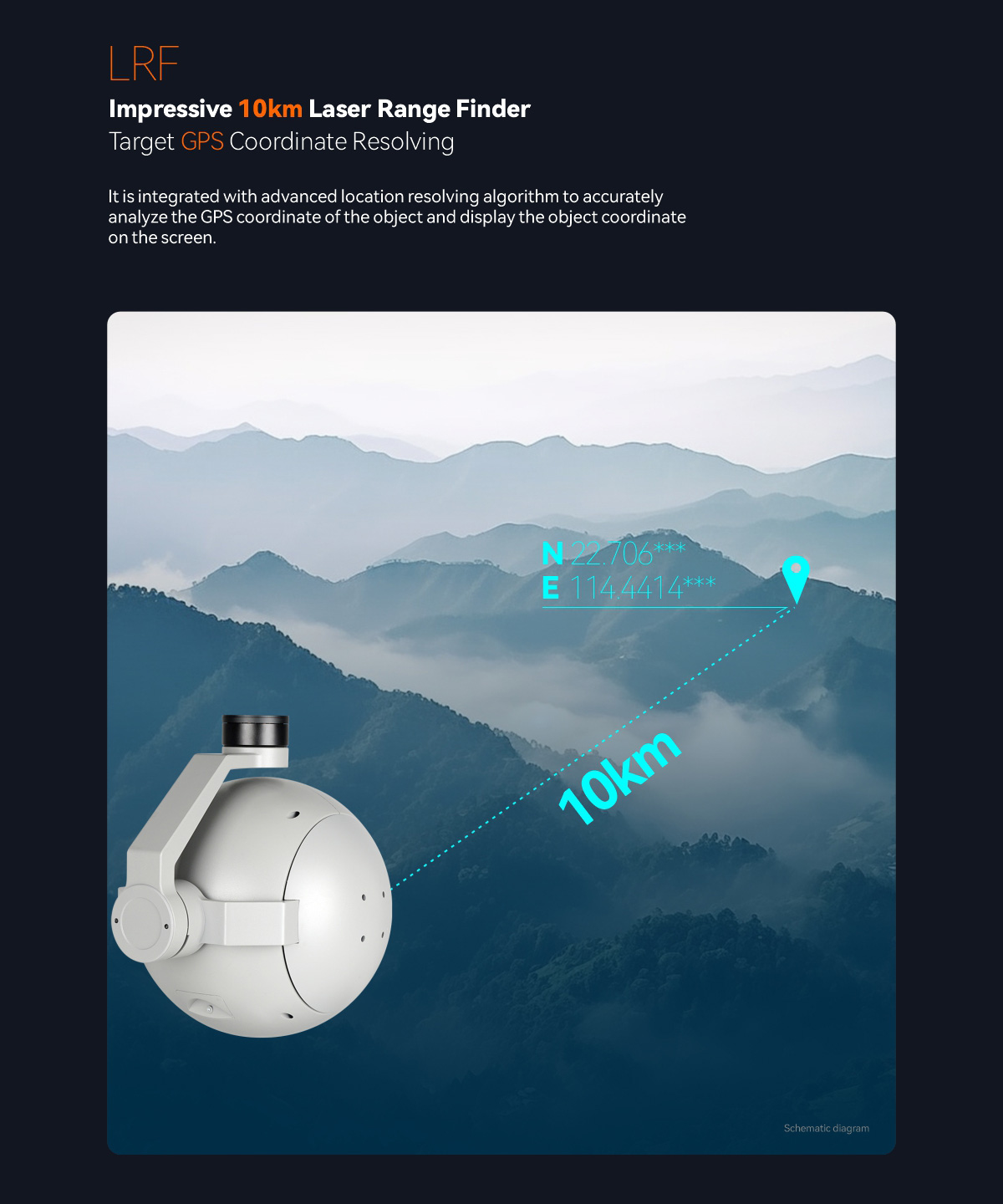
| Range | 10km for big target (eg. building) ≥6km for car (2.3m×2.3m) ≥2.5km for people (1.75m×0.75m) (Based on typical value: LOS visibiligy: ≥10km Diffuse reflection rate: ≥0.3 Humility: ≤80%) |
| Accuracy | ≤2m (RMS) |
| Light Beam | 1535±5nm pulse laser |
| Divergent Angle | ≤0.5mrad |
| Laser pulse frequency | 1~10Hz |
| Min measuring range | ≤30m |
| Location Resolving | Latitude and longitude of target |
| Rangefinder | Measure the distance between the object at the center of screen and the laser rangefinder |
| Features | |
| OSD | Display the gimbal’s yaw and pitch angle, magnification, ranging value, card recording duration, aircraft GPS and altitude or target ranging point GPS and altitude (choose one of them, and target ranging point GPS and altitude), date and time |
| Geotagging | Display time and GPS coordinate in picture exif |
| Card reading online | SMB read pictures or videos / HTTP read pictures or videos |
| KLV (UDP) | Card recording or Viewlink video playback |
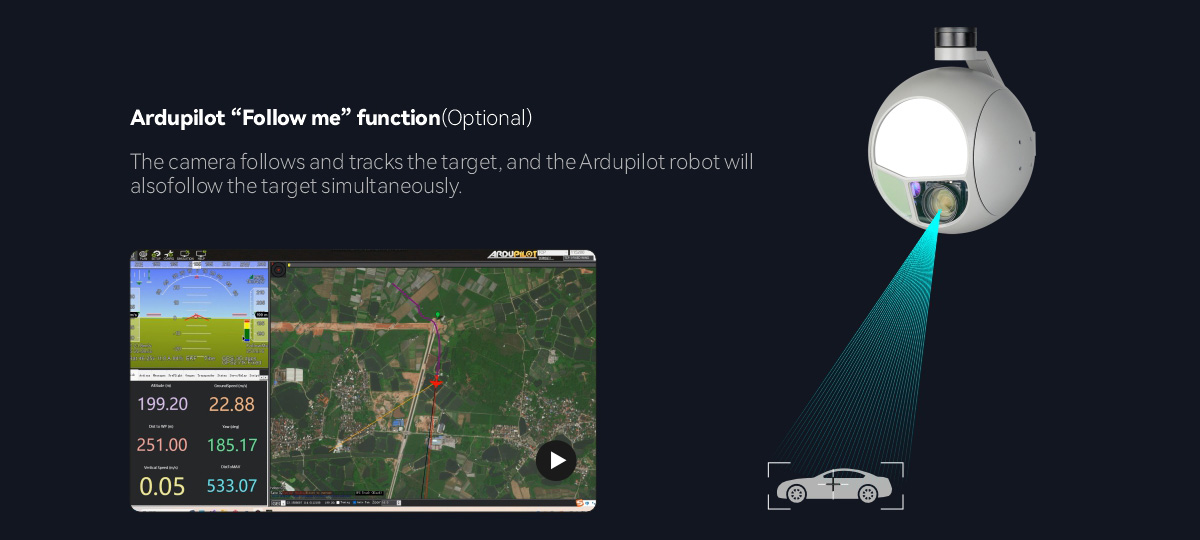
| ArduPilot / PX4 | Support(Mavlink protocol ) Optional: Support Ardupilot Follow me feature |
| Video switching | EO+IR /IR+EO /EO /IR |
| Dual video stream output | Not support(EO and IR two stream output) |
| Packing Information | |
| N.W. | 5370±20g(Viewport version with Viewport) |
| Product meas. | 266.7*236*335.1mm(Viewport version with Viewport) |
| Accessories | 1pc gimbal camera device, screws, copper cylinders, damping balls, damping boards, 1pc USB to TTL cable / Hight quality plastic box with foam cushion |